Enabling Object and Data Physicalization through a DIY Wearable Unit for Pressure-based Encountered-Type Fingertip Haptics

The detailed presentation is also available on Youtube here; and the 2 minutes teaser as well.
Virtual Reality (VR) or Augmented Reality (AR) enable the visualization and exploration of content, by augmenting a 2D rendering through a depth perception. In this paper, we investigate how to augment this depth perception by leveraging fingertips haptics. We propose Haptixel, a lightweight DIY encountered-type wearable unit, providing on-demand force- feedback on the users’ fingertips’ pulp. Haptixel translates digital information into pressure and force-based haptics as if they were physicalized pixels. Haptixel is servoed in force and we conducted a technical evaluation showing that Haptixel has an accuracy of 0.04 N. We also characterized the effect of finger support material (rigid, flexible) on the users’ force perception, and eventually quantified Haptixel’s Just Noticeable Difference (JND) to be around 0.6 (Weber fraction). We propose a design space for Haptixel, where Haptixel can be used to provide feedback with any visual support, through different force levels and contact types; conveying in-hand and off-hand exploration properties, whether inherent from the digital environment or to interpret as an encrypted pattern. We illustrate our design space through a user evaluation (n = 16); we show that participants can significantly discriminate at least four levels of forces (+ no contact) with a 0.34 N global accuracy in a VR pixel art- like application – where participants drew the physical patterns they perceived over blank canvas. We finally propose a set of use-cases with Haptixel, including virtual and augmented object manipulation, data exploration and manipulation, urban planning, navigation guidance or piano mentoring.
Haptixel’s is a DIY wearable device, entirely 3D printed and relying on a servomotor, a FSR sensor, a proximity sensor and a vibration motor. Design ans scripts will be made available on this page shortly!

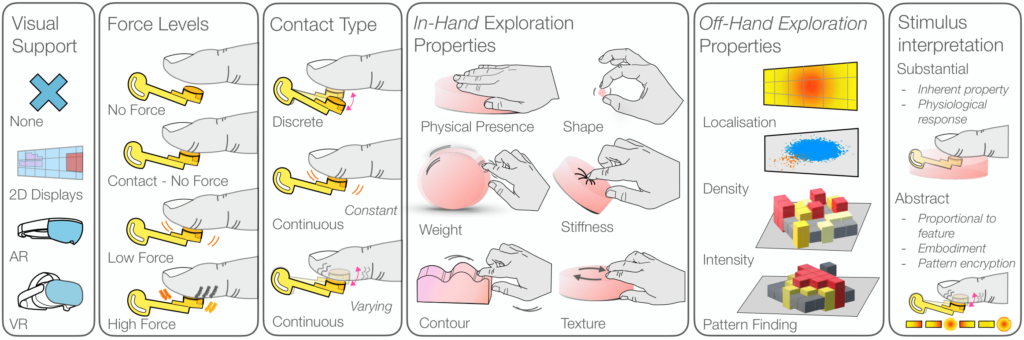
We drew a 6-Dimension design space for Haptixel, and more generally Pressure-based Encountered-type Wearable Fingertip Haptics (considering they are servoed in force).
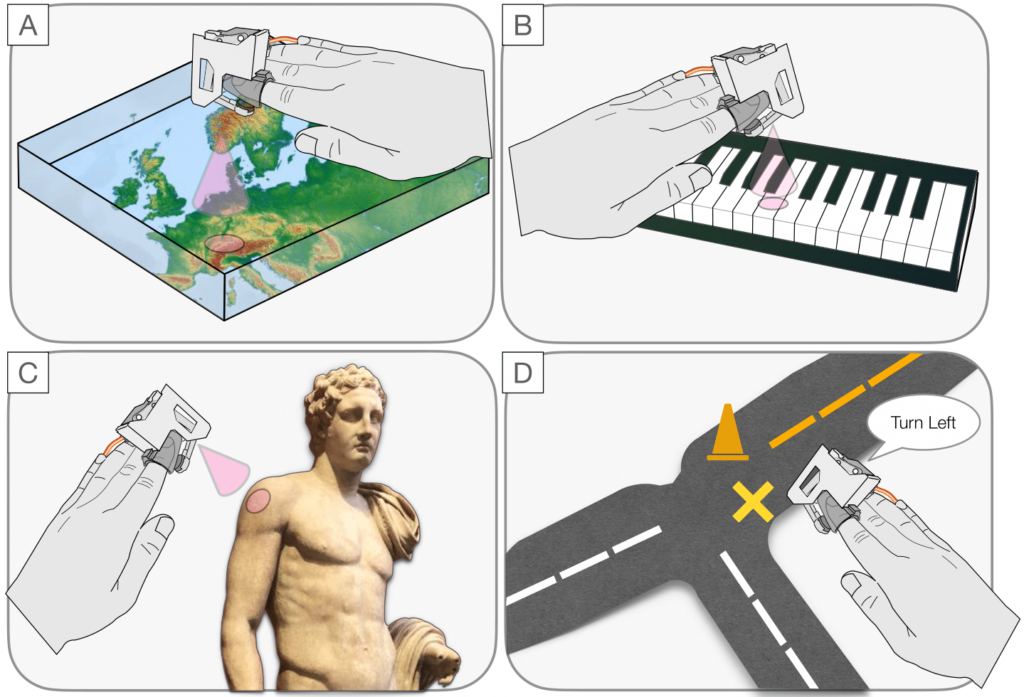
We propose a set of use-cases for Haptixel, where its use would depend on its associated visual support.
(A) Geographic Data Physicalization; (B) Piano Mentoring; (C) Museum Exploration – Volumetric Data Physicalization; (D) Navigation example.