On-demand
-

Haptixel
Enabling Object and Data Physicalization through a DIY Wearable Unit for Pressure-based Encountered-Type Fingertip Haptics The detailed presentation is also available on Youtube here; and the 2 minutes teaser as well. Virtual Reality (VR) or Augmented Reality (AR) enable the visualization and exploration of content, by augmenting a 2D rendering through a depth perception. In this paper, we investigate how to augment this depth perception by leveraging fingertips haptics. We propose Haptixel, a lightweight DIY encountered-type wearable unit, providing on-demand…
-
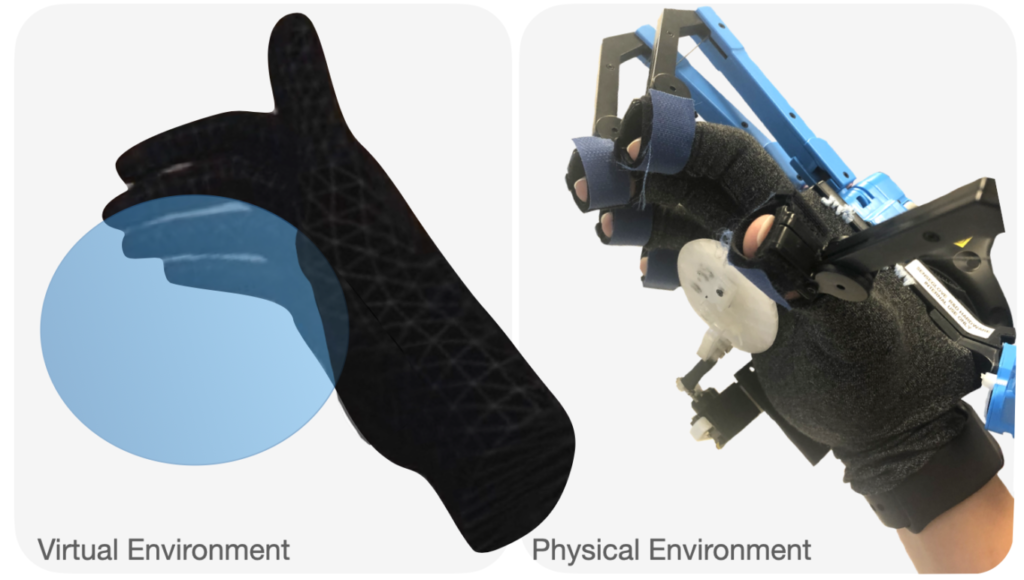
PalmEx: Adding Palmar Force-Feedback for 3D Manipulation with Haptic Exoskeleton Gloves
Haptic exoskeleton gloves are a widespread solution for providing force-feedback in Virtual Reality (VR), especially for 3D object manipulations. However, they are still lacking an important feature regarding in-hand haptic sensations: the palmar contact. In this paper, we present PalmEx, a novel approach which incorporates palmar force-feedback into exoskeleton gloves to improve the overall grasping sensations and manual haptic interactions in VR. PalmEx’s concept is demonstrated through a self-contained hardware system augmenting a hand exoskeleton with an encountered palmar contact…