I am currently a Postdoctorate researcher at UPNA Lab – Interactive Future Devices in Pamplona (Spain).
I have a PhD in Human-Computer Interaction, Haptics and Robotics from Sorbonne Université (Paris, France). I focus on interaction with 3D digital content (e.g., in VR, AR, volumetric displays) through all types of haptics, whether passive, pseudo-, active or contactless. My main research areas are HCI, Virtual Reality, Haptics and Robotics. I did my first Post-doctorate fellowship at Centre Inria de l’Université de Rennes (France). My latest projects are uploaded on this website.
Latest News:
Haptixel – Encoding Data through Cutaneous Force-based Encountered-Type Fingertip Haptics
See Project >
In this paper, we investigate whether cutaneous force-feedback can be used as a quantitative channel for visualization tasks. We propose Haptixel, a DIY self-contained encountered-type wearable device, providing force-feedback to its user’s fingertip pulp.
Haptixel can be used to complement visualization tasks through combinations of force levels and contact types.
Published in CHI’26 – ACM Conference on Human Factors in Computing Systems
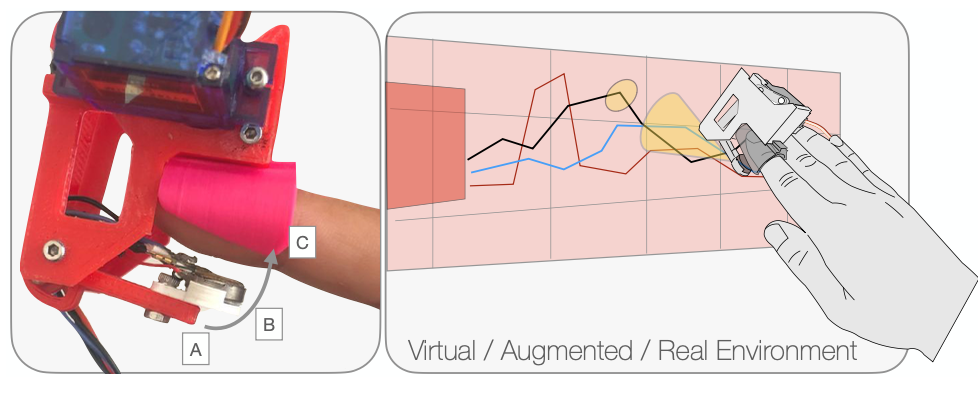
Flexible Reality – Can Pseudo-Haptics Enhance Vibration Intensity Perception in Co-Located AR Interaction?
See Presentation >
Pseudo-haptics and visuo-haptic illusions have widely been studied in virtual reality. But what about AR? More especially, what about co-located AR direct interaction – where the real and virtual interaction occur at the same location?
Can pseudo-haptics provide similar vibratory intensity perception in AR as much as in VR? Can visuals solely replicate the effects of strong haptic vibratory feedback?
This is what this paper investigates!
Spoiler: answer is yes!
Published in IHM’25 – ACM International Francophone Conference on Human-Computer Interaction
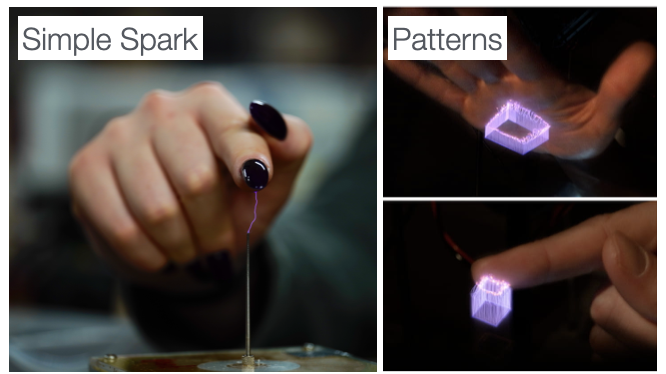
SparkTouch – Contactless Haptic Spatial Patterns on the Palm and Fingertip using Electric Sparks
See Paper >
This research investigates whether contactless haptics can be used to provide patterns at the finger-scale — using electric sparks through a Tesla coil. It compares intensity thresholds and pattern recognition accuracy between the palm and fingertip, and demonstrates an equivalence between the two. It also shows results similar to other contactless technologies on the palm, leading the way to a broader adoption and usability of contactless haptics in the future.
Published in WHC’25 – IEEE World Haptics Conference 2025 – Long paper Proceedings
🏆 Honorable Mention (top 5%)
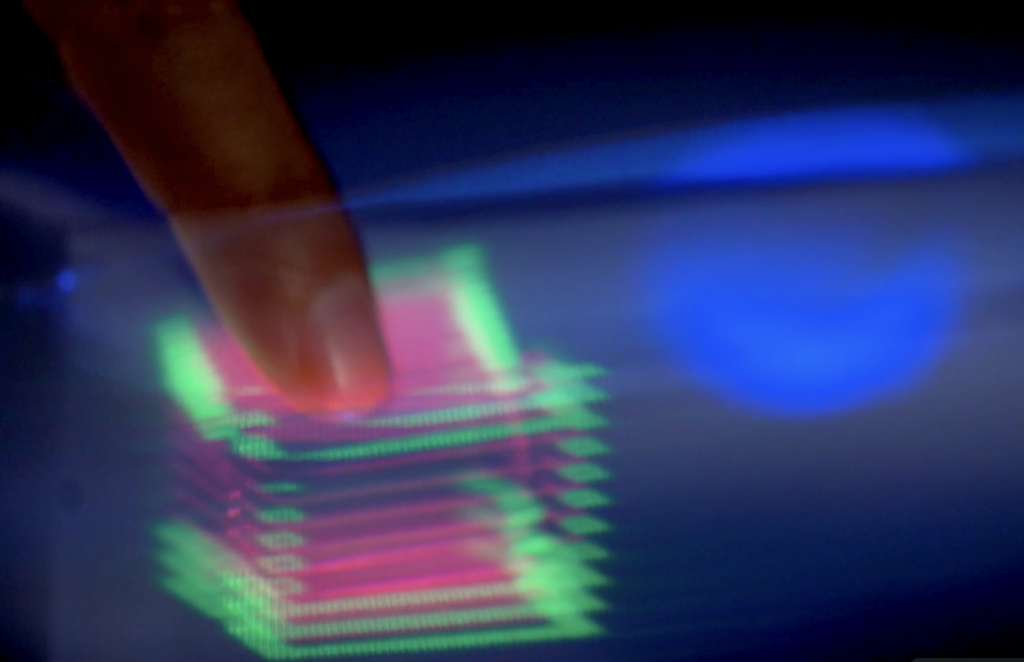
FlexiVol – a Volumetric Display with an Elastic Diffuser to Enable Reach-Through Interaction
See Project >
Moving forward from VR and AR, using headsets, I now investigate the use of Volumetric displays.
Volumetric displays render true 3D graphics without forcing users to wear headsets or glasses. However, the optical diffusers that they employ are rigid and thus do not allow for direct interaction.
We propose FlexiVol, a novel concept of using elastic diffusers for volumetric displays, to enable reach-through direct interaction.
Published in CHI’25 – CHI Conference on Human Factors in Computing Systems 2025 – Proceedings Paper
🏆 Honorable Mention (top 5%)
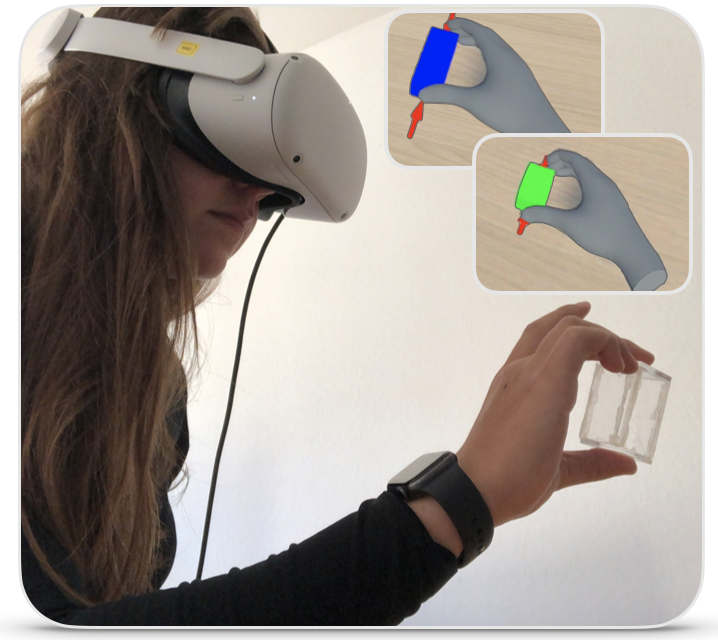
“When Tangibles become Deformable” – Studying Pseudo-Stiffness Perceptual Thresholds in a VR Grasping Task
See Project >
I propose to investigate how to extend the haptic properties of tangibles in VR, using pseudo-haptic techniques, and focused on instantiating compliance into rigid tangibles.
This can be used with prior work to instantiate 1 physical object -> K virtual renderings -> N Haptic renderings.
This opens up novel opportunities to simplify the design of future haptic interfaces and extends the haptic properties of passive props in VR.
Published in TVCG Special Issue and IEEE Conference on Virtual Reality + 3D User Interfaces 2023 Proceedings Paper
Best PhD Thesis Award – Multidisciplinar – Rewarded at IHM’22 – 33rd Francophone Conference of Human-Computer Interaction, in Namur (Belgium)
I was invited to present my PhD at IHM’22 in Namur (Belgium), after receiving the award of the best PhD Thesis.
I was a great honor to receive this first award and a great pleasure to share my PhD work once again after my defense!
“Let’s Meet and Work it Out!” – Understanding and Mitigating Encountered-type of Haptic Devices Failure Modes in VR
See Project >
Encountered-type of haptic devices primary function is to overlay virtual objects of interest, by physically encountering the users in VR to provide haptic feedback.
In this paper, we use an FMEA – Failure Modes and Effects Analysis – approach to analyse ETHD potential failures and highlight their associated strategies; and ultimately provide a groundwork and guidelines for ETHD designers.
Published in IEEE Conference on Virtual Reality + 3D User Interfaces 2022

Robotised Tangible UI for Multimodal Interactions in VR
Anticipating Intentions to Physically Encounter the User

I presented some of my work at IHM x IG x RV 2021.
I provide a Framework towards the Enhancement of Robotic Graphics technology, through replicable implementation methods and intention models at different scales. Finally, I describe CoVR, a robotic graphics interface I designed, through its interaction capabilities.
A small Overview of my PhD Thesis!
“Can I Touch This?”: Survey of Virtual Reality Interactions via Haptic Solutions
See Project >
This article is a survey of Virtual Reality interactions, relying on haptic devices.
We propose two dimensions to describe and compare the current haptic solutions: their degree of physicality, as well as their degree of actuation. We depict a compromise between the user and the designer, highlighting how the range of required or proposed stimulation in VR is opposed to the haptic interfaces flexibility and their deployment in real-life use-cases.
Published in IHM Conférence 20’21

CoVR: A Large-Scale Force-Feedback Robotic Interface for Non-Deterministic Scenarios in VR
See Project >

CoVR is a robotic interface that provides large force-feedback to the users in Virtual Reality. It consists of a XY-Cartesian robot mounted over the ceiling, which moves accordingly with the users’ intentions, in order to physically overlay virtual objects prior to the user interaction.
Published in UIST ’20 Proceedings
Industry Research and Development:
My work @ StretchSense Ltd >
I worked for 3 years as a Systems Integration Team Lead at StretchSense Ltd in Auckland, New Zealand. I was responsible for conceiving and developing wearable technologies and smart garments using EAP (electro-active polymers, capacitive sensors).