Encoding Data through Cutaneous Force-based Encountered-Type Fingertip Haptics
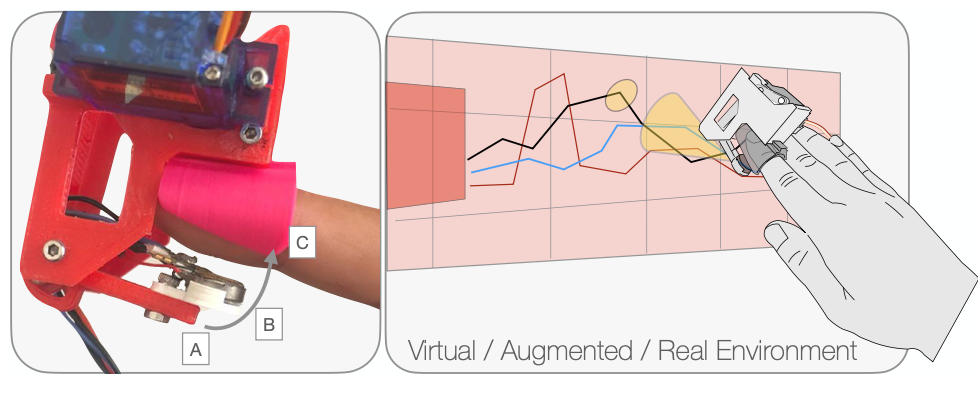
(Left) Haptixel consists in a lightweight DIY wearable unit, (A) leaving the fingertip free and (B) encountering the users fingertip pulp to provide low, or (C) high levels of forces (and vibrations); with proximity and force sensing. Its concept relies on cutaneous force discrimination and allows to perform quantitative distinctions, treating force as univariate value mapping. Its capabilities allow (Right) to physically encode data values to complement visual encod- ing, or to convey additional dimensions to substitute it.
Haptixel: Encoding Data through Cutaneous Force-based Encountered-Type Fingertip Haptics
Data visualization benefits from non-visual cues to enable people to understand information by engaging with it through multimodality, yet most approaches rely on cumbersome technologies or large scale artifacts, making them difficult to adapt to dynamic or complex datasets. In this paper, we explore the use of cutaneous haptics as a lightweight quantitative channel for visualization tasks, allowing users to feel data and interact with it dynamically. We present Haptixel, an open-source DIY encountered-type wearable providing force-feedback on the users’ fingertips’ pulp. We propose an interaction framework illustrating how Haptixel can be used to complement visualization tasks through combinations of force levels and contact types. We evaluate our approach in a pixel-art-like VR user study (n=16) where pixels color/height are associated to forces as a univariate value mapping. Results show that participants can retrieve information with Haptixel, and significantly discriminate 3D-data with at least four levels of forces; suggesting that cutaneous force-feedback can function for quantitative distinctions in visualization tasks.
Haptixel’s is a DIY wearable device, entirely 3D printed and relying on a servomotor, a FSR sensor, a proximity sensor and a vibration motor. Design ans scripts are made available on this repository!

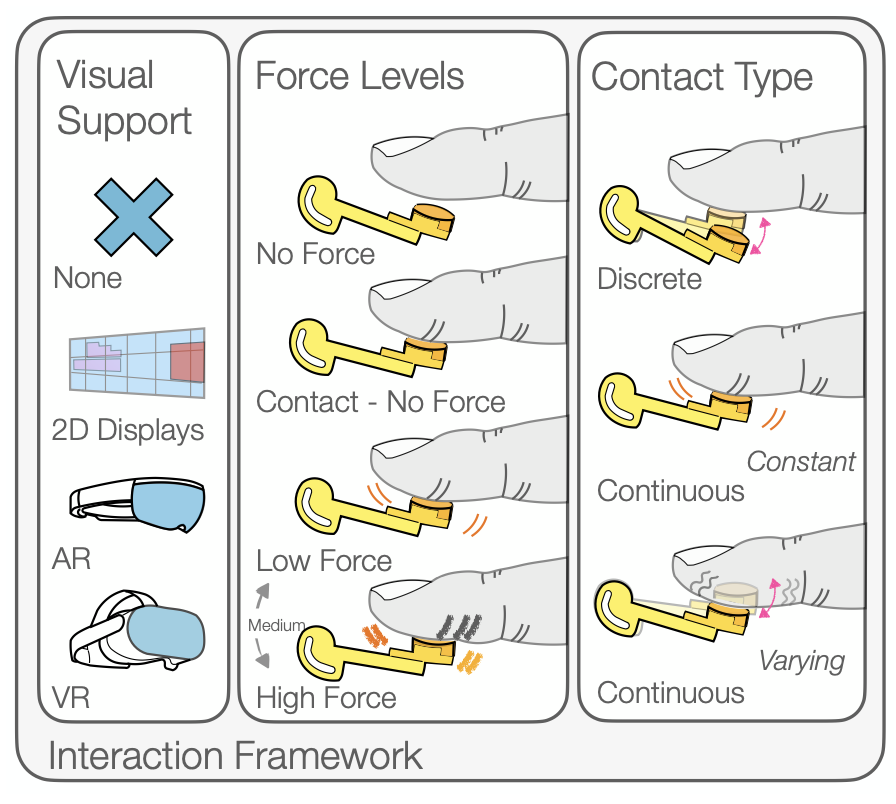
We drew a 3-Dimension Interaction framework for Haptixel, and more generally Pressure-based Encountered-type Wearable Fingertip Haptics (considering they are servoed in force).
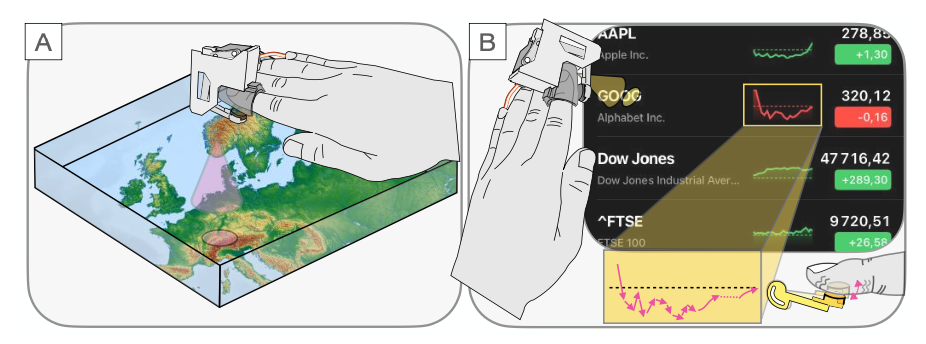
Example Use-Cases: (A) Geographic Data Physicalization; (B) Stock Market Trend Evolution: Haptixel replicates the trends movements using its continuous varying contact type.