ETHD
-

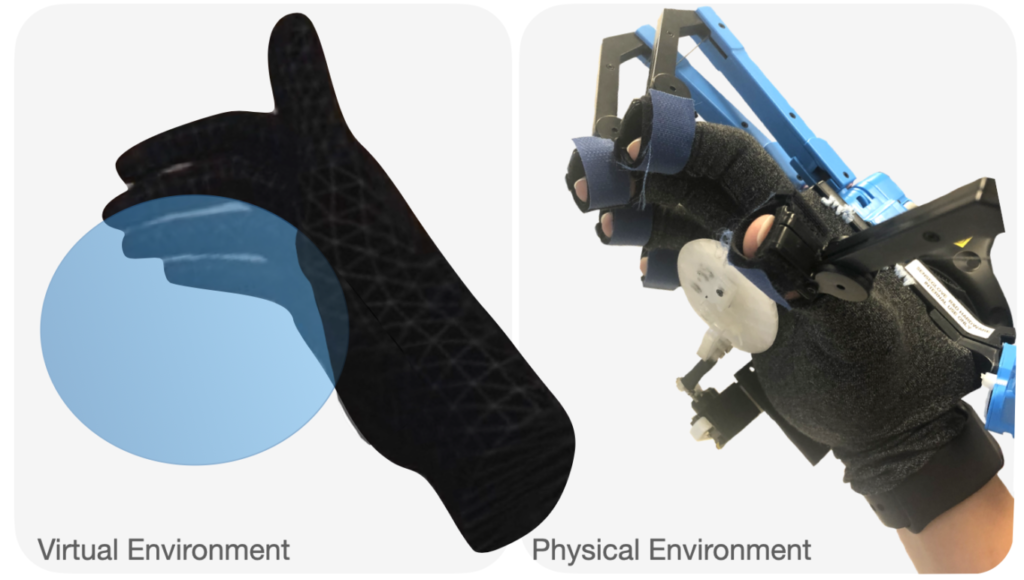
PalmEx: Adding Palmar Force-Feedback for 3D Manipulation with Haptic Exoskeleton Gloves
Haptic exoskeleton gloves are a widespread solution for providing force-feedback in Virtual Reality (VR), especially for 3D object manipulations. However, they are still lacking an important feature regarding in-hand haptic sensations: the palmar contact. In this paper, we present PalmEx, a novel approach which incorporates palmar force-feedback into exoskeleton gloves to improve the overall grasping sensations and manual haptic interactions in VR. PalmEx’s concept is demonstrated through a self-contained hardware system augmenting a hand exoskeleton with an encountered palmar contact…
-
“Let’s Meet and Work it Out!”
Understanding and Mitigating Encountered-Type of Haptic Devices Failure Modes in VR Encountered-type of Haptic devices (ETHD) are robotic interfaces physically overlaying virtual counterparts prior to a user interaction in Virtual Reality. They theoretically reliably provide haptics in Virtual environments, yet they raise several intrinsic design challenges to properly display rich haptic feedback and interactions in VR applications. In this paper, we use a Failure Mode and Effects Analysis (FMEA) approach to identify, organise and analyse the failure modes and their…