Artefact
-

Haptixel
Encoding Data through Cutaneous Force-based Encountered-Type Fingertip Haptics Haptixel: Encoding Data through Cutaneous Force-based Encountered-Type Fingertip Haptics Data visualization benefits from non-visual cues to enable people to understand information by engaging with it through multimodality, yet most approaches rely on cumbersome technologies or large scale artifacts, making them difficult to adapt to dynamic or complex datasets. In this paper, we explore the use of cutaneous haptics as a lightweight quantitative channel for visualization tasks, allowing users to feel data and…
-
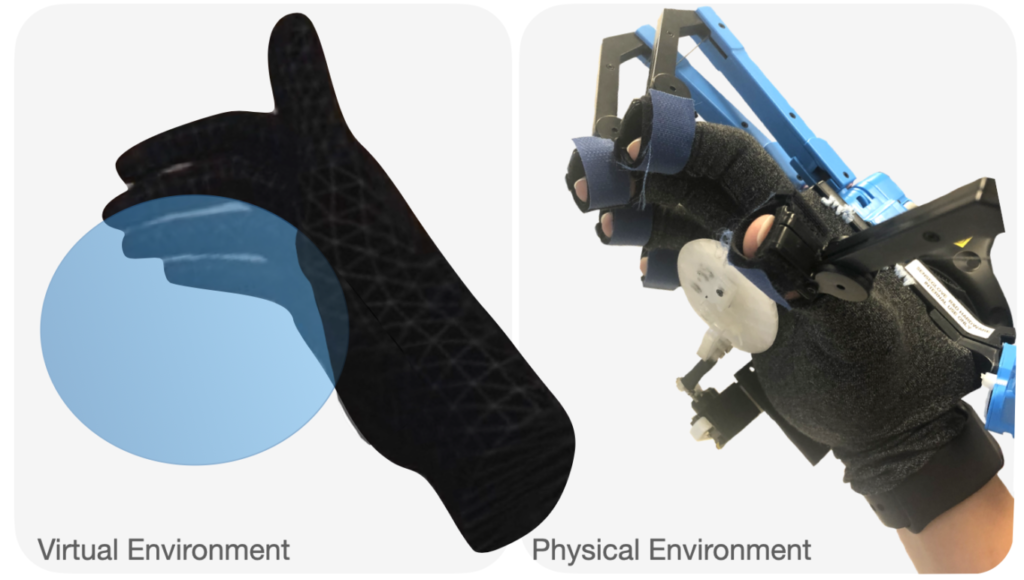
PalmEx: Adding Palmar Force-Feedback for 3D Manipulation with Haptic Exoskeleton Gloves
Haptic exoskeleton gloves are a widespread solution for providing force-feedback in Virtual Reality (VR), especially for 3D object manipulations. However, they are still lacking an important feature regarding in-hand haptic sensations: the palmar contact. In this paper, we present PalmEx, a novel approach which incorporates palmar force-feedback into exoskeleton gloves to improve the overall grasping sensations and manual haptic interactions in VR. PalmEx’s concept is demonstrated through a self-contained hardware system augmenting a hand exoskeleton with an encountered palmar contact…